入選ICCV2023 單目3D檢測論文成果應用于無人駕駛水平運輸
2023-08-29 14:34 來源:飛步科技
近日,飛步科技與浙江大學等合作的論文《MonoNeRD: NeRF-like Representations for Monocular 3D Object Detection》被ICCV接收。ICCV全稱為計算機視覺國際大會(International Conference on Computer Vision),由IEEE舉辦,是全球范圍內計算機視覺領域的頂級學術會議。ICCV2023共收到全球范圍內8068篇投稿,最終收錄2160篇,接受率為26.8%。
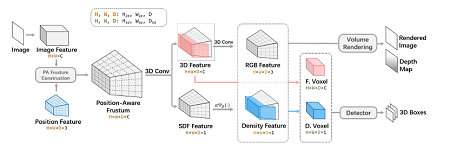
為了解決這個問題,論文提出了一種新穎的單目3D檢測框架:MonoNeRD,僅需輸入單張圖片,就可以通過稠密的三維幾何信息與占用(Occupancy)情況來推斷目標在三維空間中的位置,從而極大地提高單目3D檢測的精度。
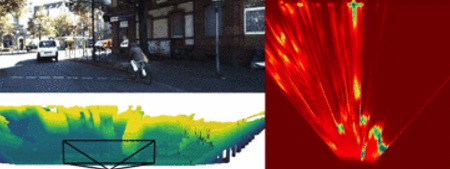
除了開展單目3D檢測并大幅提升效率外,論文提出的方法還可以作為一個高效三維占用(3D occupancy)推斷器。相較于以往的三維占用預測方法,MonoNeRD無需使用特別標注的三維占用數據集進行訓練。在KITTI 3D、Waymo Open Dataset等具有代表性的三維目標檢測公開數據集上的實驗表明,與現有的基于顯示幾何線索的單目3D檢測算法相比,MonoNeRD的表現更加優越,在Waymo Open Dataset上的總體3D平均精度/朝向加權平均精度(3D mAP/mAPH)提升5-10個點。

-
暫無記錄