港口鐵路運輸也能無人化?“自動駕駛機車”來啦!
2022-08-01 13:42 來源:日照港
在無行業借鑒、無成功案例、無成熟技術的背景下,山東港口日照港以機械化替人、自動化減人、智能化無人為目標,成立鐵運公司研發團隊,經過半年技術攻關,力克五大技術難題,推進“自動駕駛機車”項目進入實質性階段。

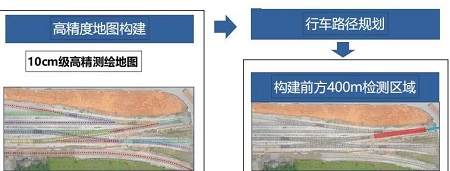
攻堅團隊通過鐵路沿線實地勘測,對比多種解決方案,最終確定打造5G+UPF專網建設與電臺指令傳輸備份冗余的實施方案,為機車自動駕駛提供高速便捷、安全可靠的信息傳輸、存儲和運行平臺,打造“云網定制、邊緣智能、云邊協同”的協同運輸、智能運輸。通過泛在感知、敏捷協同、快速傳輸等項目方案,實現工業化和信息化的深度融合,從而實現港口鐵路運輸從傳統型向智慧型轉型發展。

自動駕駛要打造緩慢起步、貼限運行、平穩停車的一流操作技術,在保障安全行駛的同時,追求最高運輸效率和最低能源消耗。攻堅團隊從最難處著手,改造技術較為落后的GKD3B機車,分析上千次優秀機車司機的駕駛習慣,模擬轉換成機車駕駛曲線,從而分析出最優駕駛曲線,機車自動駕駛就是模擬最優秀的機車司機駕駛習慣。系統具備自學習功能,在模擬模擬最優駕駛習慣的基礎上,自我學習優化改進,不斷提升運輸效率和降低能源消耗。

機車自動連掛站場停留車輛,必須對車輛進行精準定位。攻堅團隊創新性地提出“三合一”校正法進行定位。首先通過現車系統識別車號,根據車號識別車輛換長,再綜合計算整列列車長度;其次在站場布設地面標簽,機車安裝應答器,在應答器與地面標簽掃描時進行定位,再通過計算機車輪周長度與旋轉圈數識別車列移動距離;三是通過聯鎖系統軌道電路分界點來識別車列頭部與尾部位置。通過“三合一”校正法,在不加裝車輛設備的情況下實現了車輛精準定位,定位可達到5m以內,破解行業技術難題。
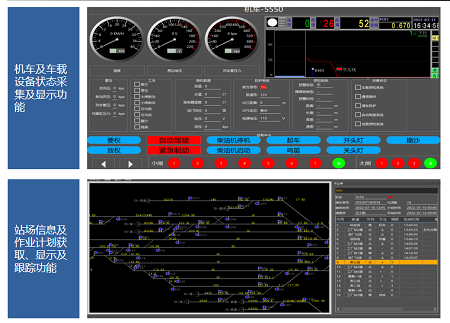
實現自動駕駛的另一大難點是要將復雜的調車作業計劃轉換成系統能夠識別的語言,從而讓機車自動執行作業計劃。基于調度集中控制系統,山東港口日照港建成全國首個路港集疏運指揮中心,為路港合同協作提供了新樣板。下一步將實現全場區調度集中,并在調度集中控制系統的基礎上,將四個區長室分散指揮變為“四樓合一”集中指揮,為全場區實施機車自動駕駛提供更加有利條件,真正達到精準調度、智慧派車,讓路局滿意,讓客戶滿意。
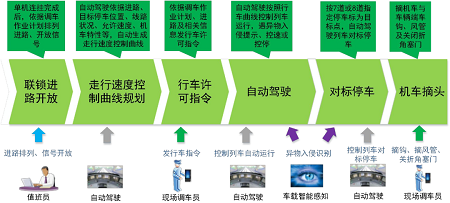
實施機車自動駕駛,最重要也是最困難的就是保障調車作業安全。港口鐵路作業模式多樣,推送、牽引、挑解、編車、取對,站場環境復雜,彎道、坡道、與裝卸作業交叉、涉鐵施工維修等等。要實現機車自動駕駛,必須貼合港口作業實際,量身定制環境智能感知系統,既要保障作業安全,又要保證基本裝卸、維修作業效率不受影響。攻堅小組經過幾十次反復研討,以目前全球最先進的AI智能識別技術,結合港口作業實際,設計出“激光雷達+毫米波雷達+智能攝像頭”的車載智能感知系統,“智能攝像矩陣+列車追蹤+全景識別”的站場智能感知系統,通過車載智能感知和站場智能感知兩個層面,保障行車作業安全,有效解決安全問題。
-
暫無記錄